Hopping Robot Balls May Conquer Mars
One of the projects that received Phase II funding from NASA Institute for Advanced Concepts, NAIC, earlier this year was a collaboration between Dr. Penelope Boston and Dr. Steven Dubowsky to develop "hopping microbots" capable of exploring hazardous terrain, including underground caves. If the project pans out, hopping microbots may some day be sent to search for life below the surface of Mars.

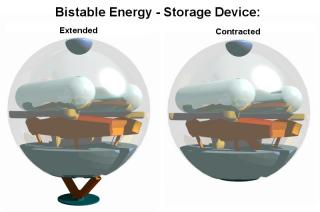
Dr. Boston describes the robots as, "robotic units that were small, very numerous (hence expendable), largely autonomous, and that had the mobility that was needed for getting into rugged terrains. Based on Dr. Dubowsky's ongoing work with artificial-muscle-activated robotic motion, we came up with the idea of many, many, tiny little spheres, about the size of tennis balls, that essentially hop, almost like Mexican jumping beans. They store up muscle energy, so to speak, and then they boink themselves off in various directions. That's how they move."
The robots would act as a swarm by coordinating their activities amongst themselves and sharing duties.

Dr. Boston goes on to assure us that the robots would not be armed to prevent them from taking over the world in a mad hopping-ball-robot coup:
"And since we're not going to mount them with any weapons capability - they're going to be very benign - the worst that I can imagine happening is mission failure, where they decide to troop off somewhere else and do something else. But we've had mission failures before. We'll have them in the future. I guess that's a possibility."
Exploring Caves with Hopping Microbots :: Astrobiology Magazine
Part 2 of Astrobiology interview with Dr. Boston

Dr. Boston describes the robots as, "robotic units that were small, very numerous (hence expendable), largely autonomous, and that had the mobility that was needed for getting into rugged terrains. Based on Dr. Dubowsky's ongoing work with artificial-muscle-activated robotic motion, we came up with the idea of many, many, tiny little spheres, about the size of tennis balls, that essentially hop, almost like Mexican jumping beans. They store up muscle energy, so to speak, and then they boink themselves off in various directions. That's how they move."
The robots would act as a swarm by coordinating their activities amongst themselves and sharing duties.
Dr. Boston goes on to assure us that the robots would not be armed to prevent them from taking over the world in a mad hopping-ball-robot coup:
"And since we're not going to mount them with any weapons capability - they're going to be very benign - the worst that I can imagine happening is mission failure, where they decide to troop off somewhere else and do something else. But we've had mission failures before. We'll have them in the future. I guess that's a possibility."
Exploring Caves with Hopping Microbots :: Astrobiology Magazine
Part 2 of Astrobiology interview with Dr. Boston
posted by Prospector at
10:35 AM
![]()
![]()

1 Comments:
It's like something from that sci-fi show LEXX.
Post a Comment
Subscribe to Post Comments [Atom]
<< Home