world's smallest mobile robot
Dartmouth researchers build world's smallest mobile robot
Dartmouth College Office of Public Affairs • Press Release
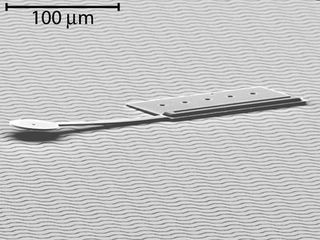
Dartmouth researchers have contributed to the miniaturizing trend by creating the world's smallest untethered, controllable robot. Their extremely tiny machine is about as wide as a strand of human hair, and half the length of the period at the end of this sentence. About 200 of these could march in a line across the top of a plain M&M.
The researchers, led by Bruce Donald, the Joan P. and Edward J. Foley Jr. at Dartmouth, report their creation in a paper that will be presented at the 12th International Symposium of Robotics Research in October in San Francisco, which is sponsored by the International Federation of Robotics Research.
"It's tens of times smaller in length, and thousands of times smaller in mass than previous untethered microrobots that are controllable," says Donald. "When we say 'controllable,' it means it's like a car; you can steer it anywhere on a flat surface, and drive it wherever you want to go. It doesn't drive on wheels, but crawls like a silicon inchworm, making tens of thousands of 10-nanometer steps every second. It turns by putting a silicon 'foot' out and pivoting like a motorcyclist skidding around a tight turn."
The prototype is steerable and untethered, meaning that it can move freely on a surface without the wires or rails that constrained the motion of previously developed microrobots. Donald explains that this is the smallest robot that transduces force, is untethered, and is engaged in its own locomotion. The robot contains two independent microactuators, one for forward motion and one for turning. It's not pre-programmed to move; it is teleoperated, powered by the grid of electrodes it walks on. The charge in the electrodes not only provides power, it also supplies the robot's instructions that allow it to move freely over the electrodes, unattached to them.
Dartmouth College Office of Public Affairs • Press Release
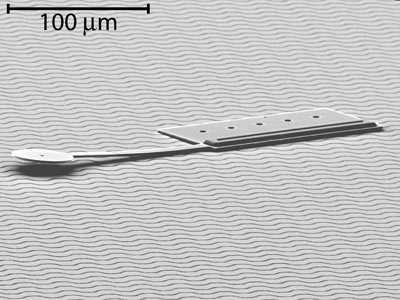
Dartmouth researchers have contributed to the miniaturizing trend by creating the world's smallest untethered, controllable robot. Their extremely tiny machine is about as wide as a strand of human hair, and half the length of the period at the end of this sentence. About 200 of these could march in a line across the top of a plain M&M.
The researchers, led by Bruce Donald, the Joan P. and Edward J. Foley Jr. at Dartmouth, report their creation in a paper that will be presented at the 12th International Symposium of Robotics Research in October in San Francisco, which is sponsored by the International Federation of Robotics Research.
"It's tens of times smaller in length, and thousands of times smaller in mass than previous untethered microrobots that are controllable," says Donald. "When we say 'controllable,' it means it's like a car; you can steer it anywhere on a flat surface, and drive it wherever you want to go. It doesn't drive on wheels, but crawls like a silicon inchworm, making tens of thousands of 10-nanometer steps every second. It turns by putting a silicon 'foot' out and pivoting like a motorcyclist skidding around a tight turn."
The prototype is steerable and untethered, meaning that it can move freely on a surface without the wires or rails that constrained the motion of previously developed microrobots. Donald explains that this is the smallest robot that transduces force, is untethered, and is engaged in its own locomotion. The robot contains two independent microactuators, one for forward motion and one for turning. It's not pre-programmed to move; it is teleoperated, powered by the grid of electrodes it walks on. The charge in the electrodes not only provides power, it also supplies the robot's instructions that allow it to move freely over the electrodes, unattached to them.
posted by Prospector at
3:46 PM
![]()
![]()

0 Comments:
Post a Comment
Subscribe to Post Comments [Atom]
<< Home