Edsinger Domo
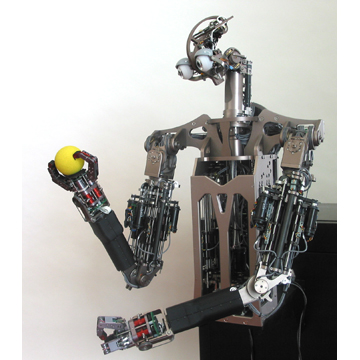
Domo is a new upper-torso humanoid robot at the MIT CSAIL Humanoid Robotics Lab. It is the doctoral work of Aaron Edsinger-Gonzales.
The goal of Domo is to contribute a novel approach to robot manipulation in unstructured environments.

The approach is centered on integrating compliant and force sensitive manipulators into a behavior based architecture that learns anticipatory sensorimotor models.
The goal of Domo is to contribute a novel approach to robot manipulation in unstructured environments.
The approach is centered on integrating compliant and force sensitive manipulators into a behavior based architecture that learns anticipatory sensorimotor models.
posted by Prospector at
7:12 PM
![]()
![]()

0 Comments:
Post a Comment
Subscribe to Post Comments [Atom]
<< Home