Balancing Ballbot Demonstrates Dynamic Stability
Another ingenious invention from the robot pioneers at Carnegie Mellon University.
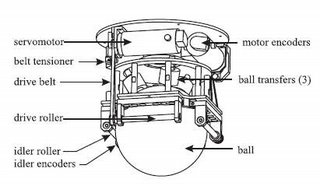
Ballbot moves and balances on a single spherical wheel.
The design of the robot is as tall as a person and slender enough to negotiate a crowded room. The center of gravity is high but it will not tip over.

The project leader, Professor Ralph Hollis, says, "We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye."
Ballbot's brains read balance information from its internal sensors and activate rollers to move the ball on which it stands.
When powered down it rests in place on three retractable legs.
Dr. Hollis recognized problems with current attempts at service robots trying to interact with people. Many robots are heavy, have a low center of gravity and are dangerous to be around. Ballbot on the other hand is agile and can yield when bumped or pushed.
Their goal is to get a robot that can easily and safely work with people in their home or workplace.
Carnegie Mellon Press Release: August 9, 2006
Movies: balance, motion
Ballbot moves and balances on a single spherical wheel.
The design of the robot is as tall as a person and slender enough to negotiate a crowded room. The center of gravity is high but it will not tip over.

The project leader, Professor Ralph Hollis, says, "We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye."
Ballbot's brains read balance information from its internal sensors and activate rollers to move the ball on which it stands.
When powered down it rests in place on three retractable legs.

Dr. Hollis recognized problems with current attempts at service robots trying to interact with people. Many robots are heavy, have a low center of gravity and are dangerous to be around. Ballbot on the other hand is agile and can yield when bumped or pushed.
Their goal is to get a robot that can easily and safely work with people in their home or workplace.
Carnegie Mellon Press Release: August 9, 2006
Movies: balance, motion
posted by Prospector at
10:59 AM
![]()
![]()

4 Comments:
What's "ingenious" about this?
For one, it's not the first inverse mouse-ball drive system.
And second, it's just a 2D inverted pendulum. The control system is almost entirely LQR (they add a small PI loop to correct for some friction effects). There's no contribution here. This is equilvalent to a homework problem in a masters level controls class (or perhaps an undergraduate student thesis).
On top of that, at the moment it can only maneuver well on carpet and can only maneuver in straight lines. (note: it can do disturbance rejection on some other surfaces)
It's not impressive. It's a toy. It would be one thing if they had to build their own IMU, but they bought a pre-built IMU. That's where most of the complexity is in this system anyway.
It's just not that cool.
Could someone be a bit angry at the world, Theo?
I think that recognizing different ways to move a service robot in a crowded room with people is worth mentioning.
I am sorry if it not cool enough for you.
The main drawback with a design such as this is one of safety. If you are going to have balancing robots like these you need to consider what happens if a fault develops with the gyro, or if the battery begins to fail. Can the robot come to a safe stop in such situations, or will it blatantly fall over, potentially causing damage to furniture, people or windows?
4 wheeled Unicycle Robot
Now meet another balancing robot. This one balances on one wheel and apparently uses two RCX bricks and four sensors along with three tires to maintain balance on the axis perpendicular to its unicycle. The robot balances on the main axis by directly powering the wheel. The axis perpendicular to its unicycle is balanced by the set of rotating tires. Check out the video!
http://www.youtube.com/watch?v=OnRV-ggJmQ4
Post a Comment
Subscribe to Post Comments [Atom]
<< Home