The goal of Domo is to contribute a novel approach to robot manipulation in unstructured environments.
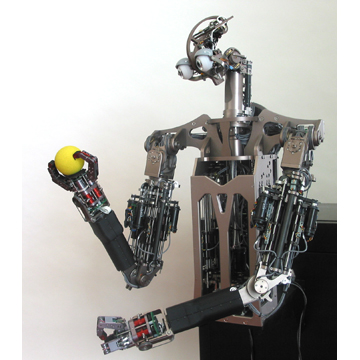
The approach is centered on integrating compliant and force sensitive manipulators into a behavior based architecture that learns anticipatory sensorimotor models.
No comments:
Post a Comment